3D数学 矩阵和线性变换之切变
本文共 8916 字,大约阅读时间需要 29 分钟。
矩阵和线性变换之切变
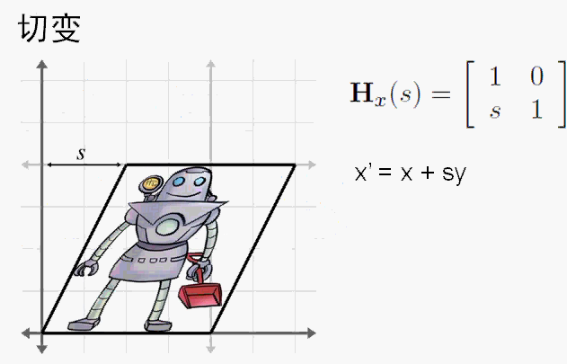
1. 什么是切变?
我们来看一幅图片。下面的图片,随着y增大,x的偏移会越来越大。这种类型的变换就叫切换。我们可以得到下图的公式x’ = x + sy。该公式转换成矩阵就得到了切变矩阵。
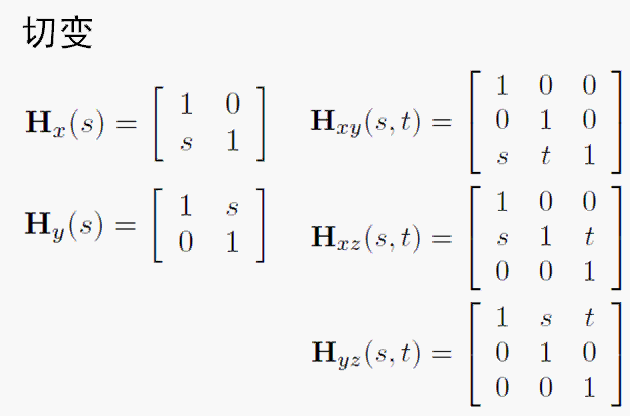
2. 切变效果的矩阵是怎样的?
在3D中,同样的道理,有如下右边三个矩阵,分别是随着z增大,x和y发生切变。随着y增大,x和z发生切变。随着z增大,x和y发生切变。
3. 切变矩阵示例代码
void Matrix3X3::setShear(E_Axis axis, float s, float t){ switch(axis) { case Axis_x: { m11 = 1; m12 = s; m13 = t; m21 = 0; m22 = 1; m23 = 0; m31 = 0; m32 = 0; m33 = 1; break; } case Axis_y: { m11 = 1; m12 = 0; m13 = 0; m21 = s; m22 = 1; m23 = t; m31 = 0; m32 = 0; m33 = 1; break; } case Axis_z: { m11 = 1; m12 = 0; m13 = 0; m21 = 0; m22 = 1; m23 = 0; m31 = s; m32 = t; m33 = 1; break; } }} 4. 切变矩阵程序完整示例代码
//MathUtil.h#pragma once#includeenum E_Axis{Axis_x,Axis_y,Axis_z};const float Pi = 3.14159f;
//Vector3.h#pragma onceclass Vector3{public: Vector3(); Vector3(float X,float Y,float Z); //变为零向量 void Zero(); //求负向量 Vector3 operator-() const; //求向量大小(长度或模) float Length() const; //标准化该向量 void Normal(); //向量的加法 Vector3 operator+(Vector3 &rhs) const; Vector3& operator+=(Vector3 &rhs); //向量的减法 Vector3 operator-(Vector3 &rhs) const; Vector3& operator-=(Vector3 &rhs); //向量乘标量 Vector3 operator*(float scalar); //向量乘等于标量 Vector3& operator*=(float scalar); //向量除以等于标量 Vector3& operator/=(float scalar); //向量除以标量 Vector3 operator/(float scalar); //距离公式 float Distance(Vector3 &vec) const; //向量点乘 float operator*(Vector3 &rhs) const; //向量叉积 Vector3 CrossProduct(Vector3& vec) const;public: float x,y,z;};//标量乘向量Vector3 operator*(float scalar, Vector3& vec); //Vector3.cpp#include "Vector3.h"#includeVector3::Vector3():x(0.0),y(0.0),z(0.0){}Vector3::Vector3(float X,float Y,float Z):x(X),y(Y),z(Z){}void Vector3::Zero(){ x = y = z = 0;}Vector3 Vector3::operator-() const{ return Vector3(-x,-y,-z);}float Vector3::Length() const{ return sqrt(x*x+y*y+z*z);}Vector3 Vector3::operator*(float scalar){ return Vector3(this->x * scalar, this->y * scalar, this->z * scalar);}Vector3& Vector3::operator*=(float scalar){ return *this = *this * scalar;}Vector3& Vector3::operator/=(float scalar){ return *this = *this / scalar;}Vector3 operator*(float scalar, Vector3& vec){ return vec*scalar;}Vector3 Vector3::operator/(float scalar){ float temp = 1/ scalar; return *this * temp;}void Vector3::Normal(){ //计算机计算乘法的速度比除法快 float temp = 1 / Length(); x *= temp; y *= temp; z *= temp;}Vector3 Vector3::operator+(Vector3& rhs) const{ return Vector3(x+rhs.x,y+rhs.y,z+rhs.z);}Vector3& Vector3::operator+=(Vector3& rhs){ *this = *this + rhs; return *this;}Vector3 Vector3::operator-(Vector3& rhs) const{ return Vector3(x-rhs.x,y-rhs.y,z-rhs.z);}Vector3& Vector3::operator-=(Vector3& rhs){ *this = *this - rhs; return *this;}float Vector3::Distance(Vector3& vec) const{ return (*this - vec).Length();}float Vector3::operator*(Vector3& rhs) const{ return this->x * rhs.x + this->y * rhs.y + this->z * rhs.z;}Vector3 Vector3::CrossProduct(Vector3& vec) const{ return Vector3(this->y * vec.z - this->z * vec.y, this->z * vec.x - this->x * vec.z, this->x * vec.y - this->y * vec.x);}
//Matrix3X3.h#pragma once#include "MathUtil.h"#include "Vector3.h"class Matrix3X3{public: //矩阵相乘 Matrix3X3 operator*(Matrix3X3& rhs); //矩阵乘等矩阵 Matrix3X3& operator*=(Matrix3X3& rhs); void setRotate(E_Axis axis,float theta); void setScale(Vector3 &vec); void setOrthProject(Vector3 &vec); void setReflect(E_Axis axis); void setReflect(Vector3 &vec); void setShear(E_Axis axis, float s, float t);public: float m11,m12,m13; float m21,m22,m23; float m31,m32,m33;};//向量乘以矩阵Vector3 operator*(Vector3& vec,Matrix3X3& mat);//向量乘等矩阵Vector3& operator*=(Vector3& vec,Matrix3X3& mat); //Matrix3X3.cpp#include "Matrix3X3.h"#includeMatrix3X3 Matrix3X3::operator*(Matrix3X3& rhs){ Matrix3X3 tempMat; tempMat.m11 = this->m11 * rhs.m11 + this->m12 * rhs.m21 + this->m13 * rhs.m31; tempMat.m12 = this->m11 * rhs.m12 + this->m12 * rhs.m22 + this->m13 * rhs.m32; tempMat.m13 = this->m11 * rhs.m13 + this->m12 * rhs.m23 + this->m13 * rhs.m33; tempMat.m21 = this->m21 * rhs.m11 + this->m22 * rhs.m21 + this->m23 * rhs.m31; tempMat.m22 = this->m21 * rhs.m12 + this->m22 * rhs.m22 + this->m23 * rhs.m32; tempMat.m23 = this->m21 * rhs.m13 + this->m22 * rhs.m23 + this->m23 * rhs.m33; tempMat.m31 = this->m31 * rhs.m11 + this->m32 * rhs.m21 + this->m33 * rhs.m31; tempMat.m32 = this->m31 * rhs.m12 + this->m32 * rhs.m22 + this->m33 * rhs.m32; tempMat.m33 = this->m31 * rhs.m13 + this->m32 * rhs.m23 + this->m33 * rhs.m33; return tempMat;}Matrix3X3& Matrix3X3::operator*=(Matrix3X3& rhs){ *this = *this * rhs; return *this;}Vector3 operator*(Vector3& vec,Matrix3X3& mat){ Vector3 tempVec; tempVec.x = vec.x * mat.m11 + vec.y * mat.m21 + vec.z * mat.m31; tempVec.y = vec.x * mat.m12 + vec.y * mat.m22 + vec.z * mat.m32; tempVec.z = vec.x * mat.m13 + vec.y * mat.m23 + vec.z * mat.m33; return tempVec;}Vector3& operator*=(Vector3& vec,Matrix3X3& mat){ vec = vec * mat; return vec;}void Matrix3X3::setRotate(E_Axis axis,float theta){ float sinValue,cosValue; sinValue = sin(theta); cosValue = cos(theta); switch(axis) { case Axis_x: { m11 = 1; m12 = 0; m13 = 0; m21 = 0; m22 = cosValue; m23 = sinValue; m31 = 0; m32 = -sinValue; m33 = cosValue; break; } case Axis_y: { m11 = cosValue; m12 = 0; m13 = -sinValue; m21 = 0; m22 = 1; m23 = 0; m31 = sinValue; m32 = 0; m33 = cosValue; break; } case Axis_z: { m11 = cosValue; m12 = sinValue; m13 = 0; m21 = -sinValue; m22 = cosValue; m23 = 0; m31 = 0; m32 = 0; m33 = 1; break; } default: assert(false); }}void Matrix3X3::setScale(Vector3& vec){ m11 = vec.x; m12 = 0; m13 = 0; m21 = 0; m22 = vec.y; m23 = 0; m31 = 0; m32 = 0; m33 = vec.z;}void Matrix3X3::setOrthProject(Vector3 &vec){ assert(fabs(vec*vec) - 1 < 0.01f); m11 = 1 - vec.x*vec.x; m12 = m21 = -vec.x * vec.y; m13 = m31 = -vec.x * vec.z; m22 = 1 - vec.y * vec.y; m23 = m32 = -vec.y * vec.z; m33 = 1 - vec.z * vec.z;}void Matrix3X3::setReflect(E_Axis axis){ switch(axis) { case Axis_x: { m11 = -1; m12 = 0; m13 = 0; m21 = 0; m22 = 1; m23 = 0; m31 = 0; m32 = 0; m33 = 1; break; } case Axis_y: { m11 = 1; m12 = 0; m13 = 0; m21 = 0; m22 = -1; m23 = 0; m31 = 0; m32 = 0; m33 = 1; break; } case Axis_z: { m11 = 1; m12 = 0; m13 = 0; m21 = 0; m22 = 1; m23 = 0; m31 = 0; m32 = 0; m33 = -1; break; } }}void Matrix3X3::setReflect(Vector3 &vec){ assert(fabs(vec*vec) - 1 < 0.01f); m11 = 1 - 2 * vec.x * vec.x; m12 = m21 = - 2 * vec.x * vec.y; m13 = m13 = -2 * vec.x * vec.z; m22 = 1 - 2 * vec.y * vec.y; m23 = m32 = -2 * vec.y * vec.z; m33 = 1 - 2 * vec.z * vec.z;}void Matrix3X3::setShear(E_Axis axis, float s, float t){ switch(axis) { case Axis_x: { m11 = 1; m12 = s; m13 = t; m21 = 0; m22 = 1; m23 = 0; m31 = 0; m32 = 0; m33 = 1; break; } case Axis_y: { m11 = 1; m12 = 0; m13 = 0; m21 = s; m22 = 1; m23 = t; m31 = 0; m32 = 0; m33 = 1; break; } case Axis_z: { m11 = 1; m12 = 0; m13 = 0; m21 = 0; m22 = 1; m23 = 0; m31 = s; m32 = t; m33 = 1; break; } }}
#include#include "Vector3.h"#include "Matrix3X3.h"using namespace std;float ToZero(float num){ return (abs(num) < 0.0001 ? 0 : num);}void print_v(Vector3 v){ cout << "[ " << ToZero(v.x) << ", " << ToZero(v.y) << ", " << ToZero(v.z) << " ]" << endl; cout << endl;}void print_m(Matrix3X3 m){ cout << m.m11 << "\t" << m.m12 << "\t" << m.m13 << endl; cout << m.m21 << "\t" << m.m22 << "\t" << m.m23 << endl; cout << m.m31 << "\t" << m.m32 << "\t" << m.m33 << endl; cout << endl;}int main(){ Vector3 a(10,20,30),b; Matrix3X3 M; M.setShear(Axis_x,1,2); print_m(M); print_v(a); b = a * M; print_v(b); system("pause"); return 0;}
5. 程序运行结果
1 1 20 1 00 0 1[ 10, 20, 30 ][ 10, 30, 50 ]
你可能感兴趣的文章
读卡耐基《人性的弱点》总结
查看>>
3码项目服务器启动报错
查看>>
MariaDB 安装与启动 使用MySQL
查看>>
Linux 常用命令
查看>>
eclipse 问题清单
查看>>
centos系统安装elasticsearch
查看>>
Java Excel文件导入到HashMap HSSFWorkbook(xls)和 XSSFWorkbook (xlsx)
查看>>
Spring boot集成flyway 的一些报错
查看>>
Spring boot2+Mybais+Mysql+flyway简单集成Demo
查看>>
阿里巴巴Java开发手册 wode摘抄
查看>>
《算法闯关记》 计数排序 桶排序
查看>>
《算法闯关记》选择排序
查看>>
《算法闯关记》 归并排序
查看>>
《算法闯关记》快速排序
查看>>
互联网UV,PU,TopN统计
查看>>
IntelliJ IDEA自身以及maven项目打包方式
查看>>
Hadoop跨集群迁移数据(整理版)
查看>>
Ranger安装部署
查看>>
Ranger安装部署 - solr安装
查看>>
Java代码规范总结,更新持续中
查看>>